|
I am currently a second-year master's student at the Institute of Automation, Chinese Academy of Sciences (CASIA). I conduct my research within the group of Prof. Dongbin Zhao, under the supervision of Prof. Qichao Zhang. My research interests primarily focus on Embodied AI and Autonomous Driving. I earned my bachelor's degree from Beijing University of Posts and Telecommunications (BUPT). During my time at BUPT, I interned under the guidance of Prof. Shunnan Guo. I have maintained close collaborations with industry partners, including Horizon Robotics and ChangAn Automobile. At Horizon Robotics, I was very honored to collaborate with Dr. Wei Yin. I also had the great honor of collaborating with Prof. Xiaoxiao Long from Nanjing University. Email / CV / Google Scholar / GitHub / |
|
|
My long-term goal is to build Physical AI that understands the physical world. Such intelligence should integrate visual and tactile inputs to comprehend properties like distance and mass, enabling reasonable control and planning. I am open to any related research directions and currently focus on Embodied AI and Autonomous Driving. My main interests include World Models, Structural Modeling, and Visuotactile Fusion. |
|
|
|
Yupeng Zheng*, Xiang Li*, Songen Gu*, Yuhang Zheng, Shuai Tian, Weize Li, Lingbo Wang, Senyu Fei, Pengfei Li, Yinfeng Gao, Zebin Xing, Yilun Chen, Qichao Zhang, Haoran Li, Wenchao Ding†. TRO, In Submission, 2026 [Homepage] A lightweight vision-language-action foundation model that integrates comprehensive world knowledge into robotic manipulation through novel two-stage training with goal-aware semantic learning. |
|
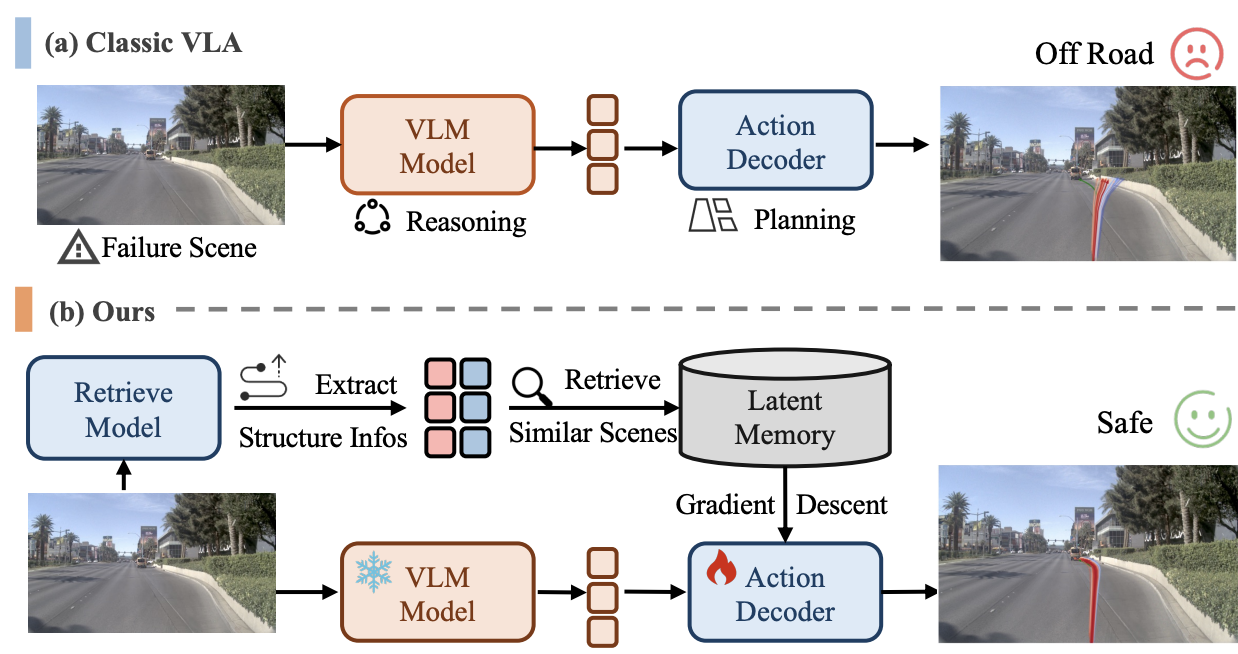
Zebin Xing, Yupeng Zheng, Qiang Chen, Linbo Wang, Yichen Zhang, Pengxuan Yang, Junli Wang, Deheng Qian, Xiaoqing Ye, Junyu Han, Yifeng Pan, Qichao Zhang†, Dongbin Zhao ACM MM, In submission, 2026 A failure-aware memory augmentation framework that introduces structural retrieval into VLA driving. |
|
Zebin Xing, Yupeng Zheng, Qichao Zhang†, Zhixing Ding, Pengxuan Yang, Songen Gu, Zhongpu Xia, Dongbin Zhao RA-L, 2025 [arXiv] [Code] A hierarchical dual-system framework that propagates goal uncertainty through Laplace distribution to generate robust trajectories with accelerated multi-rate guidance. |
|
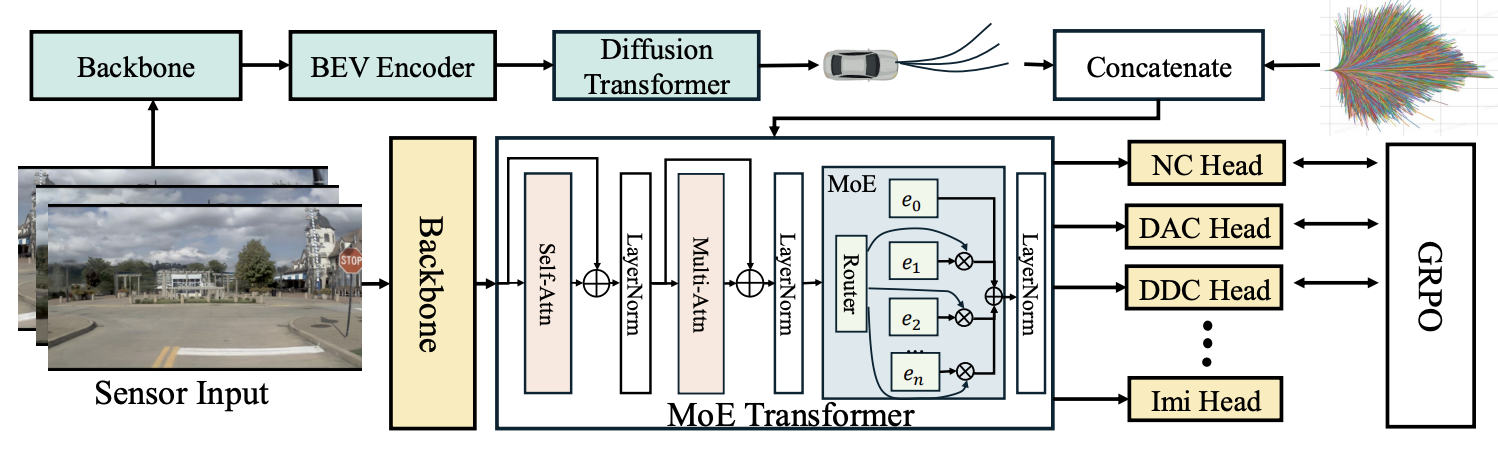
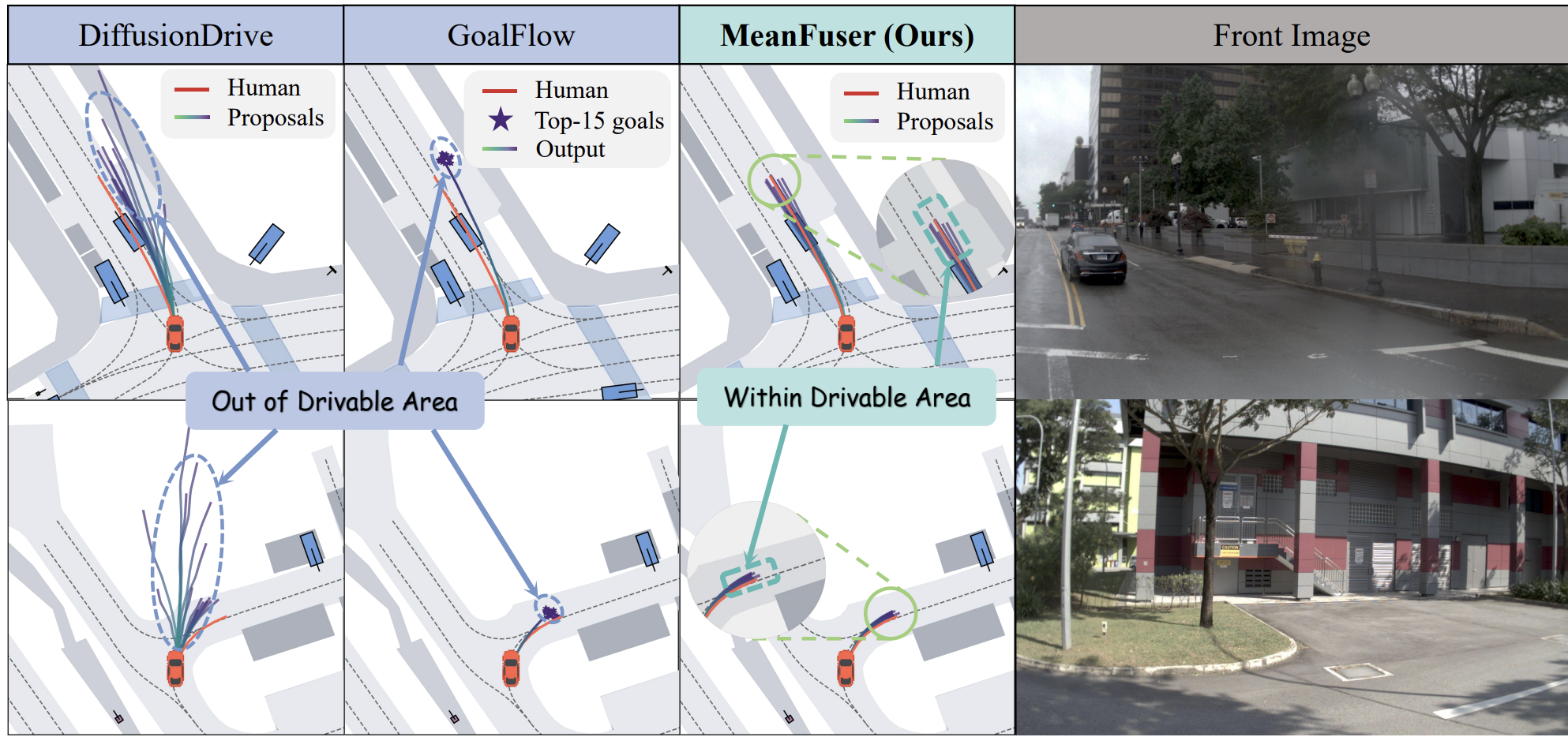
Zebin Xing, Pengxuan Yang, Linbo Wang, Yichen Zhang, Yiming Hu, Yupeng Zheng, Junli Wang, Yinfeng Gao, Guang Li, Kun Ma, Long Cheng, Zhongpu Xia, Qichao Zhang, Hangjun Ye, Dongbin Zhao CSIS-IAC 2026 (Best Paper)🥉3rd of ICCV NAVSIM Challenge [axiv] A scene-adaptive trajectory planning paradigm that dynamically selects trajectory priors via Mixture of Experts and refines scoring through reinforcement learning. |
|
Junli Wang, Yinan Zheng, Xueyi Liu, Zebin Xing, Pengfei Li, Kun Ma, Hangjun Ye, Guang Chen, Guang Li, Long Chen, Zhongpu Xia, Qichao Zhang† CVPR, 2026 [arXiv] [Code] A fast one-step generative method with adaptive trajectory reconstruction for efficient end-to-end autonomous driving. |
|
Pengxuan Yang, Yupeng Zheng, Qichao Zhang†, Kefei Zhu, Zebin Xing, Qiao Lin, Yunfu Liu, ZHIguo Su, Dongbin Zhao, ICRA 2025 [arXiv] [Code] A safety-centric planning paradigm that incorporates online map uncertainty estimation into motion prediction with uncertainty-collision-aware trajectory selection. |
|
Junming Wang, Xingyu Zhang, Zebin Xing, Songen Gu, Xiaoyang Guo, Yang Hu, Ziying Song, Qian Zhang, Xiaoxiao Long, Wei Yin† IROS, 2025 [arXiv] [HomePage] [Code] The first comfort-oriented end-to-end driving framework that generates temporally consistent trajectories through conditional diffusion and dual-stream adaptive scoring. |
|
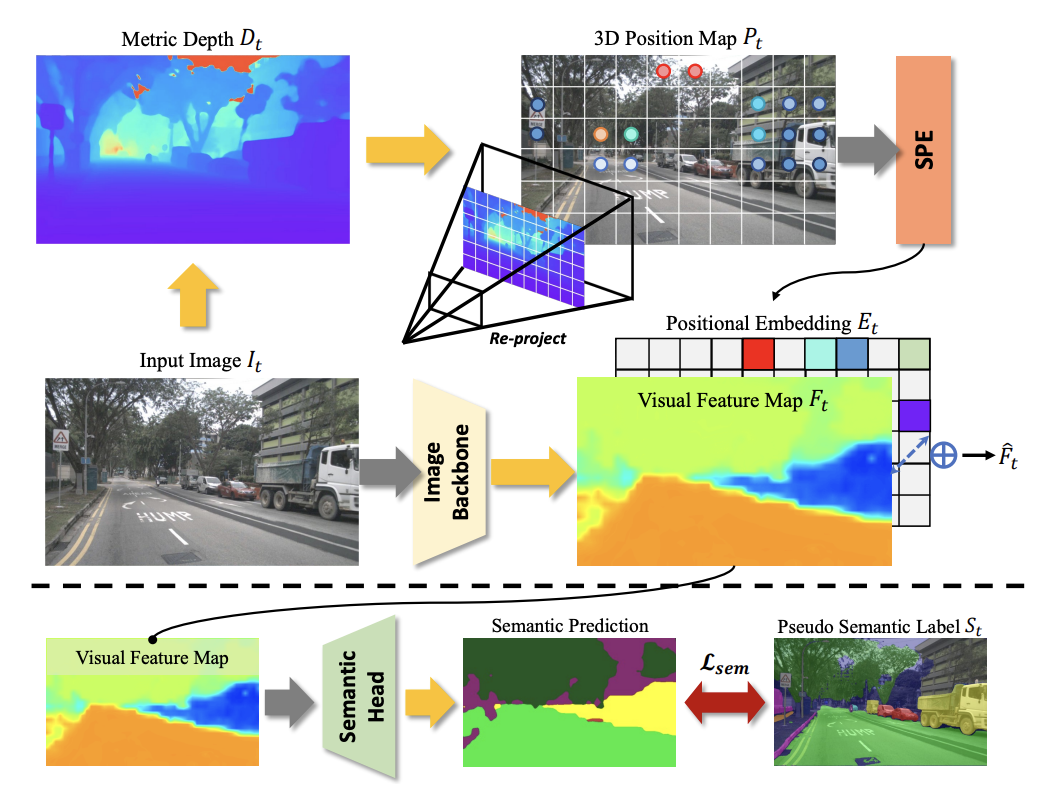
Yupeng Zheng, Pengxuan Yang, Zebin Xing, Qichao Zhang†, Yuhang Zheng, Yinfeng Gao, Pengfei Li, Teng Zhang, Zhongpu Xia, Peng Jia, Dongbin Zhao ICCV, 2025 [arXiv] [Code] An intention-aware physical latent world model that enables perception annotation-free end-to-end driving through vision foundation models and self-supervised world modeling. |
|
Zebin Xing*, Xingyu Zhang*, Yang Hu, Bo Jiang, Tong He, Qian Zhang, Xiaoxiao Long, Wei Yin† CVPR, 2025 [arXiv] [Homepage] [Code] A goal-driven flow matching approach that constrains multimodal trajectory generation through scene-aware goal scoring for efficient flow matching-based planning. |
|
Junming Wang, Wei Yin*, Xiaoxiao Long†, Xingyu Zhang, Zebin Xing, Xiaoyang Guo, Qian Zhang, ICRA, 2025 [arXiv] [HomePage] [Code] An efficient 3D semantic occupancy network leveraging linear-complexity RWKV architecture with domain-specific blocks for real-time geometric and semantic understanding. |
|
Yupeng Zheng*, Zebin Xing*, Qichao Zhang†, Bu Jin, Pengfei Li, Yuhang Zheng, Zhongpu Xia, Kun Zhan, Xianpeng Lang, Yaran Chen, Dongbin Zhao TCDS, 2025 [arXiv] [Code] The first multi-modal large language model agent for closed-loop planning that introduces hierarchical reasoning and self-reflection into autonomous driving systems. |
|
|
|
|
|
Outside of research, I enjoy taking walks in the park, binge-watching TV shows, and swimming. |
|
Website template from Jon Barron. |